robot end effector pdf
Experiment shows that this end effector can perform the task of cutting and smashing branches within 1 cm. End effectors are the piece of the robot that interacts with the parts or components in the environment.

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
Their undoubted advantage is a low friction coefficient and high tensile strength that is the ratio.

. These are mounted on the end of the 3-dof translational robot arms to form serial robots with translational and rotational capability. 7 End effector that uses mechanical fingers actuated by a mechanism to grasp an object. The next design phase of an end effector is to look at how the robot will move with this tool and if it needs an offset or angle bracket to make it easier to move in the operating space.
1 2 Device that attaches to the wrist of the robot arm and enables the general-purpose robot to perform a. Robots such as robot arms legged and wheeled machines or flying systems that can be modeled using the same techniques. End effectors are found at the end of the robots arm.
End effectors can be grippers or process tooling and are essential for a successful application. The same kind of tendons are used to transfer the force from the active joints to the passive ones. End effector system working with robot manipulator in two mode.
Some examples of end. Bright1 ARTICLE INFO Article details Advanced robotic systems are an Submitted by authors 2 Dec 2019 Accepted for publication 7 Apr 2021 Available online 28 May 2021 robotic end Contact details. This ranges from a simple gripper to sanding and video camera kits.
The Robotic Tool Changer brings flexibility to robot applications by allowing the robot to change end-effectors eg grippers vacuum cup tooling pneumatic and electric motors weld guns etc automatically. Introduction Classification of EndEffectors Actuator System for EndEffectors Mechanical Hands Special Tools Universal Hands Practical Implementation. Whatever the cause the consequences involve possible damage to the end effector or maybe even the robot itself.
The end-effector may be holding a tool or the end-effector itself may be a tool. In fact most robots can be described accurately enough by a single body or a set of bodies on which different forces act. The drill that would be used in this project was a Desoutter CFD 1155398 which is a manual drill meant to be held by hand and not by a robot.
Skip to Article Content. The end effector is the part that reacts to stimuli and interacts with the environment. However these forces can come from different sources.
The end effector could wrok well on the robot manipulator shown in Figure 7. A process cannot be automated and optimized. Using April Tag to lacate the object and grasp or suck it.
The part of the robotic arm that grabs objects is called an end effector This wire-snare device is designed to fit over special grapple fixtures knobbed pins on the Shuttle ISS and ISS modules. The object is suck by the suction. Abstract and Figures.
Have students think of a job that an end effector could do and design an end effector for the job. Although distributors robotic kits sometimes include end effectors it is essential to choose the right one for your task. This paper describes a capstone design project in developing an end -effector for robotic arm that is capable of grasping objects of varying sizes.
A robotic end effector is the device that is mounted onto the end of a robot arm. Robot Hands and EndEffectors. An end effector is a tool attached to the end of a robotic arm to enable specific applications.
Abstract and Figures. Summary This chapter contains sections titled. INTRODUCTION Pruning is a cultivation technology that has great influence on the size flowering and production of fruit trees 1-3.
Human-Robot Interface for end effectors 161 4. Note I write primary above because the 3 translational joints also cause rotations and also the 3 wrist joints can cause translations of the tool. System of the driveline All actuators are connected to the active joints by the Nylon-Kevlar wire.
The task was to design an end effector. Skip to Article Information. The Master plate is installed on the robot arm and locks to the Tool plate with a pneumatically-driven locking.
The end effector in this case should hold a drill as well as a sensor. An end effector is a kind of tool holder which is placed at the end of a robot. In other words it is the end effector that picks and places objects assembles product pieces stacks cartons and parcels etc.
The object is grasp by finger gripper. End effector on a robot manipulator platform UR5. A robot arm moving in free space is.
The measurement of the robotic manipulator end-effector interaction forces can in certain cases be challenging especially when using robots that have a small payload and. AUTOMATION AND ROBOTICS BCS 419 INTRODUCTION TO ROBOT AND. The center point of end -effector should remain as close as possible to the same location ie.
View Robot EndEffectorspdf from CSE 1004 at Vellore Institute of Technology. A straight -line path over the range of gripper motion. The robot uses the end-effector to accomplish a task.
DEVELOPMENT AND ANALYSIS OF RECONFIGURABLE ROBOTIC END-EFFECTOR FOR MACHINING AND PART HANDLING CE. Overload Protection When some unexpected event happens to the end effector such as a part becoming stuck in a die or a tool caught in a moving conveyor. But there are many options and manufacturers and you.
The design parameters are as follows. View ROBOT END EFFECTORS LECTURE pdf from DATA STRUC CS205 at Accra Polytechnic. There are many types of end-effectors for different types of applications.
Sometimes they are referred to as end-of-arm tooling or manipulator. Keywords - pruning robot end effector robot I. Motion of the robot end-effector.
This activity demonstates how an end effector is constructed to resemble a human hand. ROBOTEND EFFECTOR INTERFACE Physical support during the work cycle 3. Powered by four low-power motors to cut with its blade saw.
Mechanical Engineering Laboratory. All the components that are being chosen for the end effector need to be configured onto the robot anticipating that everything was done correctly the first time. The end effector is like a mechanical hand with a cylinder 332 centimeters 1307 in in diameter by 258 centimeters 1016 in deep.
Robotics 1 Lecture 7 End Effectors.

Pdf Robot Dynamics Dao Viettu Academia Edu
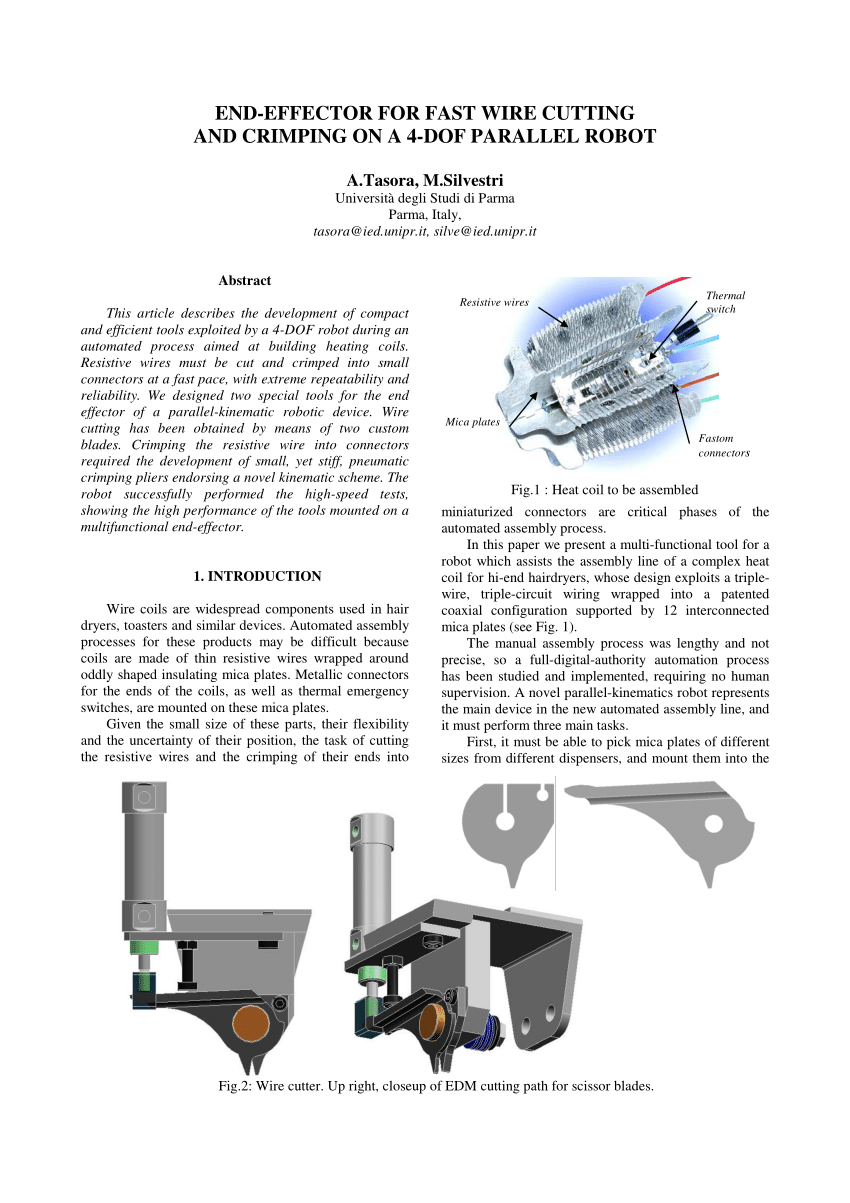
Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot

Robot End Effector Pdf Manufactured Goods Machines

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
Pdf End Effector For Tomato Harvesting Robot

Pdf Robotics 1 Lecture 7 End Effectors

Unit Ii Robots Drive Systems And End Effectors Part A Questions Pdf Free Download

Pdf Development Of Robotic End Effector Using Sensors For Part Recognition And Grasping
Robot End Effector Definition And Examples

A Reconfigurable Robotic End Effector For Machining And Part Handling Machine Tool Simulation Semantic Scholar

Pdf End Effector For Fast Wire Cutting And Crimping On A 4dof Parallel Robot

Pdf Basics Of Robotic Arm Structures Sai Prashaanth Academia Edu

Multi Function End Effector Comau Pdf Catalogs Technical Documentation Brochure

Robot End Effector Definition And Examples

Robot End Effector Pdf Manufactured Goods Machines

Pdf Manual Serial Arm Thanh An Truong Academia Edu
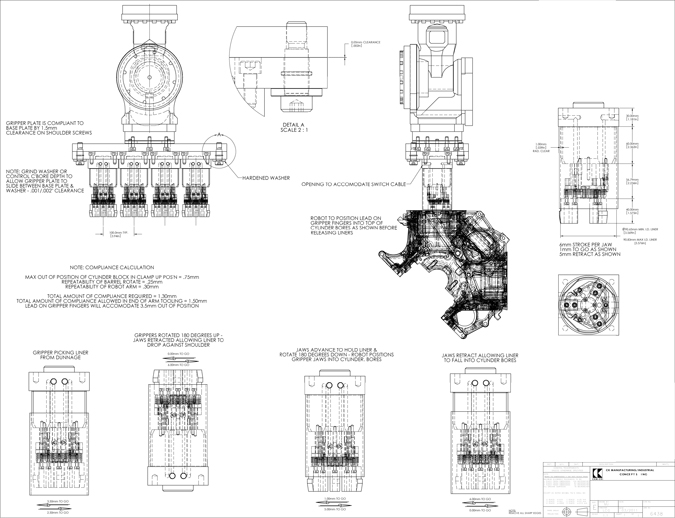
Ck Manufacturing Industrial Manufacturing Military Manufacturing Industrial Design Gantry Robot End Effectors Pick And Place Elevators Buffer Storage Automation Elevators Tip Ups Barrel Type Rotates End Effectors

How To Choose The Right End Effector For Your Application Pdf Free Download

How To Choose The Right End Effector For Your Application Pdf Free Download